L’usure d’un vélo se voit notamment sur sa transmission : sa chaîne d’abord, puis, faute d’entretien et de remplacement, sur les pignons. Les motorisations au pédalier accroissent considérablement cette usure. Cent watts de muscles humains + 250W de d’assistance électrique : une puissance s’exerçant aussi sur la friction, de 350 watt donc, au lieu de 100.
À cela s’ajoute les changements de vitesses parfois mal synchronisés avec une chaîne en tension au moment du changement de pignon. Contre cela, pas de solution miracle si ce n’est de la vigilance. Dans l’idéal, il faudrait une pression sur le levier de frein au moment du changement de vitesse, suffisamment légère pour ne pas avoir de contact du frein, et suffisamment importante néanmoins pour que le moteur se coupe.
Mais la dégradation d’une chaîne se doit surtout à l’usure sur la durée, microscopique, qu’engendre le cisaillement des poussières à l’intérieur de la chaîne, entre les différentes parties qui composent chaque maillon. Il faut autant que possible prévenir la souillure de la chaîne. La lubrification à l’huile, de ce point de vue là, pose un vrai problème. Elle améliore certes la performance de la transmission avec une friction réduite. Mais sa viscosité amène toute la poussière ambiante à s’y coller, et contraint à des nettoyages fréquents. Au fur et à mesure, et même malgré ces nettoyages, des poussières vont s’insérer dans la chaîne, et difficilement en sortir. La solution de prédilection est alors de privilégier un lubrifiant qui ne colle pas, la cire. C’est ce qu’on trouve déjà posé sur les chaînes neuves. Rien n’empêche après quelques centaines de kilomètres d’en remettre soi même.
Je vous partage à cette fin ces chouettes vidéos trouvées aujourd’hui, qui exposent à la fois les enjeux résumés précédemment, les différents lubrifiants et cires utilisés, les différentes façon de nettoyer une chaîne, et comment faire soi-même une cire optimale et l’appliquer sur sa chaîne. Un entretien selon ces conseils devrait permettre théoriquement de ne pas changer ses pignons avant 45 000 km parcourus ! Il faut sans doute préciser que cette estimation est surtout valable pour un vélo sans assistance au pédalier. Un pédalier motorisé peut considérablement accélérer la durée de vie de la transmission, sans attention particulière à son entretien. Mais c’est justement pour cette raison que le bon entretien d’une transmission de vélo à motorisation au pédalier est crucial.
(résumé : un gramme de téflon pour 10 grammes de paraffine. Bien mélanger à une température permettant la liquéfaction, mais inférieure à 95°C ; baigner et remuer la chaîne bien nettoyée dedans, puis laisser sécher pour usage vtt/gravel, ou essuyer sommairement pour un usage sur route. Dé-rigidifier les articulations par quelques mouvements avant de la reposer sur le vélo, sans oublier de nettoyer les pignons et galets au préalables)
« Quel intérêt à choisir un moteur bas de gamme, quand les grands motoristes proposent le nec plus ultra, à seulement 2000-4000 euros ? »
Même dans les petites villes, comme à Laval, on voit clairement la hausse du recours au vélo électrique. Il fait des émules, et tant mieux si cela permet de se passer de la voiture. (ce qui n’est pas toujours vrai ; c’est pour certains cyclistes juste une aubaine que de se motoriser. Mais aussi l’occasion d’aller plus loin qu’on ne l’aurait fait à la seule force des mollets. Le report modal, comme on dit dans le jargon de l’économie des transport, est difficile à mesurer, mais forcément approximatif à la seule échelle individuelle).
Ce qu’on constate aussi, sans trop de surprise, mais avec un certain regret, c’est le recours croissant à la motorisation par des des grandes entreprises de l’électronique. Je pense à Bosch en particulier, il y en a d’autres. Bosch s’y connaît en « moteur brushless », ou moteur sans charbon ou sans balais, comme on les appelle aussi. Il n’y a pas de doute, vu toute la gamme de moteur électrique qu’ils produisent, pour votre meuleuse préférée ou encore la perceuse de votre voisine qui travaille dans le BTP, ou le métro de votre cousin habitant une grande ville. Les grandes boites de moteur électrique s’y connaissent en moteur électrique, assurément ; là n’est pas la question. De même que Mercedes et Peugeot s’y connaissent en voiture. S’y connaissent tellement bien qu’ils ne considèrent pas nécessaires que d’autres s’y connaissent et puissent s’arranger. D’ailleurs vous avez déjà pesté ou entendu votre garagiste pester contre l’invasion de l’électronique sous le capot des nouvelles voitures.
(Si vous n’avez pas de goût ou de temps pour une mini-nouvelle relatant une effroyable dystopie, vous pouvez directement passer à la 2nde partie de cet article)
Il était une fois…
Donc maintenant vous avez un signal du panneau de bord pour vous rappeler de faire votre vidange. Bien pratique ce petit rappel. Vous avez aussi ce petit voyant lumineux qui vous rappelle constamment une défaillance mineure fantôme, que votre garagiste a corrigé sans pouvoir le signaler au système électronique embarqué. Et aussi ce petit signal sonore strident, qui rappelle au passager avant, votre berger allemand docile, qui ne bouge pourtant pas en voiture, ou votre pot de bégonias massif, donné par votre oncle Jacques, de mettre sa ceinture. Et l’autre fois, c’était Gillou votre pote d’enfance, qui vous a proposé de changer ensemble la courroie de distribution. Vaste et téméraire entreprise, que de changer sa courroie. Il y en a bien pour 700 euros avec le garagiste, c’est sympa de la part de Gillou, que de vous le proposer, enfin à votre initiative en échange d’un hébergement dans votre mansarde pour ce mois d’août. Mais comme pour le vieux garagiste, il n’a pas sa mallette électronique Volkswagen, La voiture propre. Donc vous cumulez :
le signal lumineux pour le rappel de la vidange qu’avait aussi assuré votre sœur,
le signal sonore de sécurité ceinture pour le berger allemand, le pot de bégonias et maintenant les 5-enclumes-pour-le-prix-d’une-super-affaire que Gillou avait oublié de décharger le mois dernier après vous avoir emprunté la bagnole pendant l’été
le signal sonore de votre courroie déjà faite, mais sans l’avoir dit au système embarqué.
le signal sonore indiquant un problème de vitre électrique pourtant résolu
le signal lumineux et sonore, tous les 50 km, pour une « anomalie » que votre garagiste n’a pas su identifier
D’ailleurs c’est assez drôle, quand les trois signaux sonores se lancent de concert, ça vous rappelle un peu « jingle bells », les quatre premières notes quoi, avant de vous casser gentiment les oreilles.
C’était amusant le temps des fêtes de fin d’année, l’intérieur à thème « sapin de noël ». Mais voilà, on arrive au mois de mars. Même le voisin dont vous riez secrètement a enlevé les guirlandes de son pavillon. Vous vous décidez donc à aller chez un garagiste Volkswagen équipé du Graal, la fameuse mallette électronique. Celle qui rassurera de ses doux signaux électriques les angoisses récurrentes d’un système embarqué capricieux. Plein de bonne foi et aussi honnête que possible dans ses prestations, le garagiste a eu la bonne idée par ailleurs de se franchiser il y a 15 ans, quand il s’est installé, c’était plus simple. Il ne pourra pas utiliser la mallette sans que son système de comptabilité intégré, fourni par son gentil franchiseur, perçoive la facturation des prestations aux tarifs définis par le contrat de franchise. Vous voyez le montant de la facture : vidange, courroie, vitre électrique, capteur témoin de pression de pneu arrière droit (« ah c’était donc ça qui buggait? ») 1495,83 euros.
Honnête comme il peut, le garagiste vous propose un geste commercial. Un avoir sur les prochaines opérations de changement de balais d’essuie-glace, rare opération qui n’est pas surveillée par l’électronique embarquée. Il a calculé. Vous pourrez revenir pour les changer à 82 reprises, essuie glace avant comme arrière, avant qu’il ne vous en coûte le moindre centime ! Consolé par cet arrangement à l’amiable, et fier de cette filouterie à l’insu du franchiseur, vous rentrez satisfait et serein dans votre véhicule silencieux.
Le charme du high tech dans une boite noire, ou la liberté dans la simplicité et l’open source ?
On l’aura compris, on peut être expert d’une technique et pas disposé à en laisser le contrôle à d’autres. C’est ce qui est arrivé avec la voiture ces dernières décennies. Si le moteur Bosch, entre autres, a des fonctionnalités ou paramétrages que n’ont pas la plupart des contrôleurs électroniques génériques du commerce, il aussi les défauts que n’a pas un contrôleur simple ou open source. Et s’il ne les a pas encore, il faut aussi re-situer cela dans une bataille commerciale de long terme, derrière les coulisses, pour s’imposer en leader du marché. On connaît tous des réseaux sociaux, sites de streaming ou musique en ligne qui en grands philanthropes, n’imposaient pas de publicité à leur début…
En l’occurrence, c’est au terme de mise à jour des logiciels embarqués qu’on peu craindre de perdre le contrôle des entrailles de la bécane. Un exemple : souvent, les engrenages démultiplicateurs d’un moteur pédalier sont faits en une sorte de résine. Plus silencieux, moins lourd que l’acier, il y a sans doute des fondements à ce choix, mais c’est aussi un facteur d’usure à long terme. Un moteur brushless n’a par définition pas de friction et ne s’use pas ou si peu, vous aurez donc des roulements ou ces engrenages à changer bien avant que le moteur ne rende l’âme. Personnellement, je ne sais pas précisément ce qui se cache spécifiquement sous le capot d’un moteur d’une grande marque. On peut facilement spéculer sur la présence de capteurs de températures, d’un ampèremètre et autres fonctionnalités avancées destinées à l’estimation plus fidèle de l’autonomie, mais peut être aussi d’un sceau ou capteur d’ouverture, rompant une garantie en cas d’ouverture intempestive. Donc devra-ton aller chez le fournisseur du VAE et seulement chez lui, pour changer les engrenages démultiplicateurs, parce qu’on n’aura pas le choix ? Et si pour une quelconque raison l’affichage LCD ne fonctionne plus, ou sa dernière mise à jour ne vous convient pas, faut-il encore dépendre du même motoriste qui a choisi ses propres fiches de connectiques et protocoles de communication avec l’écran d’affichage ?
On voit ici que ce phénomène, qui a été dénoncé depuis un certain temps dans le monde automobile, s’invite aussi insidieusement dans le vélo électrique. Les constructeurs veulent garder la mainmise ; il s’arrogent un « monopole radical » dirait en fin analyste Ivan Illich, sur une technique dont on perd le contrôle. On n’est alors plus autonome dans sa compétence. Qu’on se comprenne. On peut ne pas s’y connaître en électronique ou en moteur, même ne pas vouloir y apprendre, et perdre tout de même au change. Une amie qui s’y connaît, un mécanicien pro, s’ils perdent en autonomie, ne peuvent pas résoudre des problèmes ou ajouter des fonctionnalités avec la souplesse qu’ils auraient autrement.
Une autre solution peut s’envisager, concernant ces verrous techniques. Plutôt que d’acheter du contrôleur générique et/ou opensource, il est certainement possible de pirater les modèles propriétaires, par exemple en flashant un nouveau code dans la mémoire du contrôleur. Quelques objections cependant : on y perd une éventuelle garantie encore valide ; il faut s’y connaître sacrément pour ne pas faire de grosses bêtises ; enfin, est-ce si intéressant dans ce cas d’avoir payé cher un dispositif à logiciel intégré, pour ensuite hacker ce dernier ?
En conclusion,
ne préjugeons pas de la supériorité des grands motoristes. Un moteur brushless requiert un certain temps pour en comprendre le fonctionnement, mais ce n’est pas inaccessible pour autant. La lutte pour l’autonomie dans nos choix de vie est un combat quotidien et aux multiples facettes. Il passe aussi par des détails très terre-à-terre ou techniques, comme le refus de dépendre de boîtes noires qui s’imposent en nous mutilant de nos capacités.
Date de publication sur blog d’origine : 11 Janvier 2019
Pilotage par Arduino de moteur brushless
[ Réédition : Visiblement j’ai dans cet article redécouvert la « régulation de tension par hachage » qui était sans doute déjà évidente à certains, qui dans leur grande mansuétude me pardonneront ; l’article aborde cependant un sujet bien plus large que cela. Le titre est par ailleurs racoleur et un poil démago, bien sûr. Plus précisément, ici on parlera du fait de contrôler une carte éventuellement propriétaire qui elle même pilotera le moteur, mais par un signal envoyé par Arduino ou tout autre signal en « PWM » et donc à l’aide d’une interface open-source !]
Si vous voulez la remise en contexte et la découvertes de plein d’expériences et de projets intéressants, lisez tout. S’il ne s’agit que de savoir comment procéder passez aux derniers paragraphes
Le petit monde des moteurs brushless et des assistances Open Source
Ceux qui se penchent sur la question du pilotage des vélos à assistance électrique les plus répandus, équipés de moteurs sans charbon (brushless) perçoivent vite que l’électronique sous le capot est complexe. Le moteur brushless fonctionne par une synchronisation de plusieurs bobines (un multiple de 3 sur les VAE, peut être même tout simplement trois) qui ainsi se magnétisent et engendre la réaction de pulsion/attraction qui entraîne la rotation du moteur. Il faut connaître la position du rotor par rapport au stator à chaque instant pour que les transistors du contrôleur alimentent tantôt une bobine, tantôt une autre. Vous n’avez pas envie que votre moteur mal synchronisé résiste soudainement à votre coup de pédale alors que vous êtes sans les mains, ou en danseuse, ou en descente dans un virage en épingle à cheveux. Ok, dans ce dernier cas normalement on s’arrête de pédaler et et le moteur n’est plus alimenté non plus, pas au delà de ce que sa propre inertie exige. Mais on retiendra par ces illustration que l’électronique de piotage est cruciale, ne s’improvise pas.
C’est sans doute pour cela que le pilotage du moteur brushless est resté longtemps dans le domaine propriétaire. Quelques grosses boites ayant développé leurs cartes de contrôle ont pris d’assaut le marché et vendent à un prix suffisamment raisonnable pour que peu trouvent à y redire. Un ESC (electric speed control) pour moteur à charbon, c’est plus rudimentaire. On l’achète pour pas cher et on peut même le faire soi-même simplement avec un transistor alimenté par le PWM d’un Arduino qui lui indiquera le niveau de puissance requise. C’est très simple et tant mieux, on peut ainsi facilement piloter le moteur. Pourquoi pas prochainement ici, et même certainement, piloter un moteur à charbon pour assistance électrique. C’est simple, c’est moins cher qu’un moyeu de roue motorisé brushless, il faut juste le monter sur une chaîne indépendamment du moyeu, et programmer le code alimentant pilotant le MOSFET qui alimente le moteur.
Pour un moteur brushless c’est plus compliqué. J’ai passé du temps, à me renseigner, chercher comment on pouvait le faire (avec l’allusion au départ que le petit autodidacte que je suis pouvais y arriver), qui le faisait. Et par miracle ou par obstination, il s’est avéré que les réponses documentées et expérimentées se faisaient notamment pas loin de chez moi.
J’ai d’abord entendu parler du projet Hope’n Bike, qui liait la super Maison du Vélo de Caen, le Fablab de la même ville, et la mission locale, dans une ambition d’aide à la mobilité des jeunes et précaire, et de formation de certains à la conversion de vélo en VAE, le tout en Open Source. Je n’ai pas été encore vérifier, mais il semble que le succès est mitigé. Plus personne dans la presse n’en parle, comme si c’était laissé en stand by. Le projet a plutôt abouti, il s’est fait au moins quelques prototypes fonctionnels. il faudrait aller voir de plus près. Mais le projet documenté sur GitHub n’avance plus. Les différents éléments sont documentés selon des formats de logiciels d’électronique différents, chacun difficile à s’approprier. C’est le revers de la médaille de l’opensource spontané, on est plein de bonne volonté mais ne se coordonne pas, et ça en devient difficile à s’approprier.
Une autre solution très intéressante et approuvée est le modèle de Vedder.se . Vedder c’est un génie suédois qui a fait sa propre carte de pilotage de moteurs BLDC, et par dessus le marché le programme sur ordinateur permettant paramétrer le fonctionnement attendu puis flasher le code correspondant sur la carte. Le tout en Open Source bien sûr. Il vend sa carte 100 euros environ, raisonnable sans doute pour une carte capable de balancer du 100 ampères sans griller .Une communauté a émergé autour de son projet, utilisé pour différents types d’engins notamment trottinettes et skateboards électriques. C’est grâce à My Human Kit que que moi et quelques rennais avons pu découvrir cela récemment, un fablab dédié aux questions de dépassement du handicap, dans le cadre d’un Hackathon coorganisé avec la Petite Rennes dédié à un une roue motorisée amovible de l’avant d’un fauteuil roulant
Bon mais nous on balance déjà entre 40 et 150 Watt de puissance musculaire dans les pédales, a-t-on besoin d’une carte capable de balancer 100 A * 36 V =3600 W ? C’est surdimensionné, évidemment, mais la compréhension de cette carte est aussi par ailleurs hors de portée de ma patience ou de mon cerveau, et de ceux de beaucoup d’usagers lambdas du vélo. J’ai beau avoir cherché à comprendre comment communiquer avec la carte, je me rappelle plus si on la piloter en tension, je vous laisse aller voir, mais les autres méthodes (« UART » « PPT »…) m’étaient inaccessibles. On est dans l’Open Source, et c’est très bien, mais pas adapté au vélo et aux bricoleuses et bricoleurs moyens. Pour des raisons de budget, de complexité, et de puissance requise. Il faudrait donc dans l’idéal trouver une autre solution.
Et alors concrètement, on fait comment ?
Heureusement il y a moyen d’acheter des cartes moins puissantes et moins chères. C’est chose faite depuis quelques temps déjà. Il faut maintenant en prendre le contrôle.
Ladite carte se commande en tension. Avec une tension plus ou moins importante, entre 0 et 5V, on lui demande quelque chose ente laisser le moteur à l’arrêt et envoyer toute la purée. Ce type de commande est pratique pour un pilotage manuel. Un potentiomètre faisant office de pont diviseur de tension, brancher les deux broches des côtés sur du 5v et la masse permet à la broche du milieu d’envoyer la tension désirée.
Très pratique, sans doute très sollicité en Chine, ou le vélo est directement électrique sans assistance. Une poignée de gaz en guise de potard, et biiim, c’est parti les petits loups. Le problème de ce pilotage c’est qu’il n’est pas directement adapté à un pilotage électronique de la carte. Je ne sais pour ma part qu’utiliser Arduino, ou des microcontrôleurs Atmel, donc il fallait trouver une solution pour qu’un signal de sortie d’Arduino, selon certaines conditions (celles de la réglementation européenne notamment : arrêt du moteur en cas de freinage, au delà de 25km/h ou de non pédalage) permette de solliciter la carte et le moteur. Pour avoir un signal analogique, on a du PWM à 5V : un clignotement entre 0V et 5V avec une proportion modulable de 0 ou de 5 V .
Allez zou, il nous faut transformer le PWM en vrai signal analogique. Il nous faut donc pour cela trouver de quoi lisser le signal, transformer des impulsions plus ou moins longue en proportion de la période, en tension plus ou moins haute sur une échelle de 0 à 5 V.
Ça semble simple comme ça, moi je ne savais pas faire. Et les recherches en lignes ne furent pas si simple qu’on en a l’habitude. Peu de gens documentent et publient ce genre de montage pourtant accessible à l’électronicien presque débutant. C’est cette page là et leurs auteurs que je dois remercier. Il fallait encore adapter le montage à du 0-5V au lieu de 0-10V. (Je crois qu’une partie du montage est inutile ou peu utile, le filtre passe-bas de sortie) Après plusieurs tâtonnements sur un site de simulation, on trouve quelque chose de relativement linéaire et proche de 0-5 ici.
Voilà, je suis content d’avoir réussi à mettre ça au point. Bientôt il n’y aura plus qu’à coder le reste des instructions sur Arduino et l’agrémenter d’un petit « digitalWrite » pour donner un ordre directement convertit en analogique pour le pilotage du moteur.
Date de publication sur blog d’origine : 27 Novembre 2018
Carroussel fait-maison par une équipe de soudeurs punks internationaux lors d’un « cyclo-camp » dans le bocage nantais. À noter que chacun pédale sur une transmission à roue libre : celui qui ne pédale pas s’il en a assez du tournis et souhaite s’arrêter méditera sur la portée concrète de son boycott individuel. Celui qui saute en courses risque de tomber mais en tout cas créera un déséquilibre du reste de la structure, faisant chavirer les autres. Une oeuvre d’art très politique en somme, sur les limites des vertus individuelles, la résistance et l’action collective.
Ceci est un article introductif, de lancement du site.
Les objets et finalités de ce site sont renseignés dans différentes parties. Les pages du site répondent au principales questions que peuvent se poser mes éventuels clients d’un point de vue pratique, mais les articles au fil de l’eau viendront aussi enrichir la réflexion et les découvertes que je souhaite partager avec tous (et pas seulement dans une relation marchande ; je veux bien faire l’épicier vite fait, mais pas que). Ce site de blog est donc deux-en-un en quelque sorte : d’une part des pages stables et facilement accessibles selon une arborescence de site normal, et non de blog ; d’autre part des articles à parution plus ou moins régulières, dont les derniers seront mis en avant sur la page d’accueil, tel un blog. Bonne lecture !
La réalisation d’un objet complexe, comme un triporteur -ou plus précisément d’un module de conversion réversible de vélo en triporteur- ne s’improvise pas. Les contraintes à considérer sont nombreuses : géométrie d’Ackermann, angles de chasse, adaptabilité à différentes dimensions et différents modèles de vélo, poids, solidité, manœuvrabilité, entre autres. J’avais déjà commencé une première ébauche de prototype, mais sans tout dimensionner au préalable. Quelques erreurs s’ensuivent. L’optimisme encourage mais n’est pas fidèle conseiller. Pour ne pas se tromper, autant faire un plan correct dès le départ.
Quel logiciel de modélisation 3D ?
J’utilise FreeCAD pour cela. Logiciel OpenSource, développé par une communauté dynamique, il ‘na pas l’ergonomie et la facilité d’usage que certains prêtent au logiciel propriétaire Fusion360 notamment, mais a un potentiel sur le long terme, sous condition de lui donner sa chance, de ne pas aller vers le plus facile. Pour que la communauté d’usager de FreeCAD laisse sa raison d’être aux développeur. L’appel à la vertu en général ne suffit pas. Il serait salutaire d’ailleurs en politique que la conscience de l’incapacité des vœux pieux à se réaliser seuls se diffuse, mais passons. FreeCAD fonctionne sous Linux, Fusion360 non, ce qui pour moi reste décisif. De plus, un MOOC bien ficelé m’a récemment facilité l’apprentissage de certaines fonctionnalités fondamentales de FreeCAD.
Un modèle modulaire, des parties et plans multiples
Pour s’adapter à différents modèle de vélos, et faire différentes modèle de vélocargo, il est indispensable de se donnerune capacité à redimensinner et modifier certaines parties du module. Mon parti pris est de faire plusieurs pièces distinctes, qui s’agencent les unes avec les autres, et peuvent être modifiées, customisées, peintes, réparées, sans changer tout le reste. On peut ainsi passer d’un biporteur à un triporteur, changer la forme et la taille de la caisse, peut être même rajouter une bascule à suspension au train avant. Je pense notamment en-mancher certaines de ces pièces les unes dans les autres, avec plus ou moins de profondeur pour s’adapter aux dimensions requises. Une tige filetée assure un réglage fin de cette profondeur, et un boulon de serrage supprime le jeu du télescopage.
On peut ainsi considérer plusieurs parties bien définies :
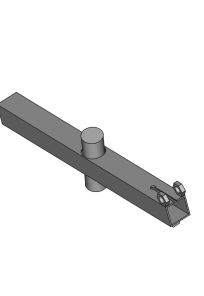
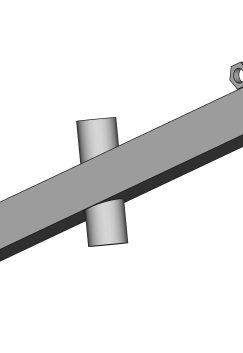
1) Le tube arrière : (à partir d’un profilé carré) il vient se boulonner à la platine servant
habituellement d’attache béquille, et s’en-manche dans le tube central.Il faudrait le courber si un moteur au pédalier est à contourner. Un écrou soudé au tube permettrait de stabiliser et régler finement la profondeur du téléscopage
2) Le tube central : celui-dans lequel s’encastre et plonge
un tube de direction récupéré aligné au tube de direction du vélo. Le tube de direction récupéré est connecté à la fourche. Il a deux fonctions : d’une part il tourne avec elle et transmet la direction aux roues par des biellettes situées sous le tube. D’autre part il même temps qu’il constitue un deuxième point d’ancrage, d’attache entre le module et le vélo, en plus de la platine porte béquille.
L’alignement des deux tubes de direction est difficile mais crucial : sans lui le guidon ne tourne plus, ou cas extrême, la direction se rompt. Deux paramètres sont modifiables pour assurer cet alignement : la profondeur de téléscopage des tubes arrière et central, et l’angle d’encastrement du tube de direction dans le tube central.
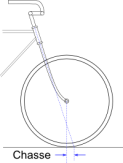
La potence dans le tube de direction est soudée à une platine dans laquelle deux fentes permettent de faire coulisser le système de fixation de la fourche : un axe de 9 mm passe dans la fourche et dans un tube rond soudé à un profilé U, tordu vers l’intérieur. Ce profile est troué en deux points correspondant à l’écart entre les fentes pré-citées. La fourche peut ainsi se fixer à la potence quelle que soit le pas de chasse de la fourche*
* Le pas de chasse : ce petit espacement indiqué sur l’image (merci au Youtuber de Science étonnante pour cette image)
Pour permettre un bon réglage de l’angle de chasse, il faut élargir un peu un premier trou réalisé à la scie cloche, vers l’avant et l’arrière. Un angle de chasse fait généralement 12 à 15 degrés. Faire d’abord deux petits points de soudure permettra un assemblage encore malléable, c’est à dire de modifier un peu l’angle. L’angle est bon une fois que les tubes central et arrière (ce dernier étant préalablement boulonné à la platine porte-béquille) n’oscillent plus quand on tourne le guidon.
Le tube avant : (à partir d’un profilé carré). Celui sur lequel on va faire reposer la caisse. Il s’encastre dans le tube central lui aussi. Son autre extrémité peut être traversé par un autre tube de direction pour réaliser un biporteur, ou attaché à un système de train avant pour un triporteur.
La caisse : bois et armature métal par exemple, forme encore à concevoir, mais le champs de possible est vaste et limité par la seule imagination.
Train avant : outre la possibilité évoqué d’un biporteur, on peut préférer un triporteur. Deux roues avant donc. Les contraintes de géométries concernant les biellettes et pattes de biellettes sont plus complexes que pour un biporteur. Heureusement, certains ont préparé le terrain, depuis la préhistoire des internets déjà, avec des documents tableurs de dimensionnement, permettant de tester l’écart entre un ensemble d’hypothèse et l’idéal que représente la géométrie d’Ackermann, aussi appelé l’épure de Jantaud : la concourrance des axes de chacune des trois roues. On pourrait aussi envisager un train avant plus élaboré, stabilisant le véhicule par un système de bascule et de suspension On pourrait ainsi se pencher un peu dans les virage, tel une bicyclette, ou rester droit malgré l’exposition des roues avant à un terrain accidenté ou une topographie asymétrique. A étudier éventuellement. La tâche est néanmoins complexe et longue, et le train avant gagnerait un poids conséquent.
La suite viendra dans des articles à venir, patience.